

諧波齒輪傳動(dòng)原理是工程師А.И.Москвитин首先與1947年提出,美國(guó)工程師C.W.Musser于1955年發(fā)明創(chuàng)造的。
通過(guò)利用柔性工作構(gòu)件的彈性變形進(jìn)行運(yùn)動(dòng)或動(dòng)力傳遞的一種新型傳動(dòng)方式,顛覆了機(jī)械傳動(dòng)采用剛性構(gòu)件的模式,從而獲得了一系列其它傳動(dòng)所難以達(dá)到的特殊功能,由于中間柔性構(gòu)件的變形過(guò)程基本上是一個(gè)余弦的對(duì)稱諧波,因此而得名。
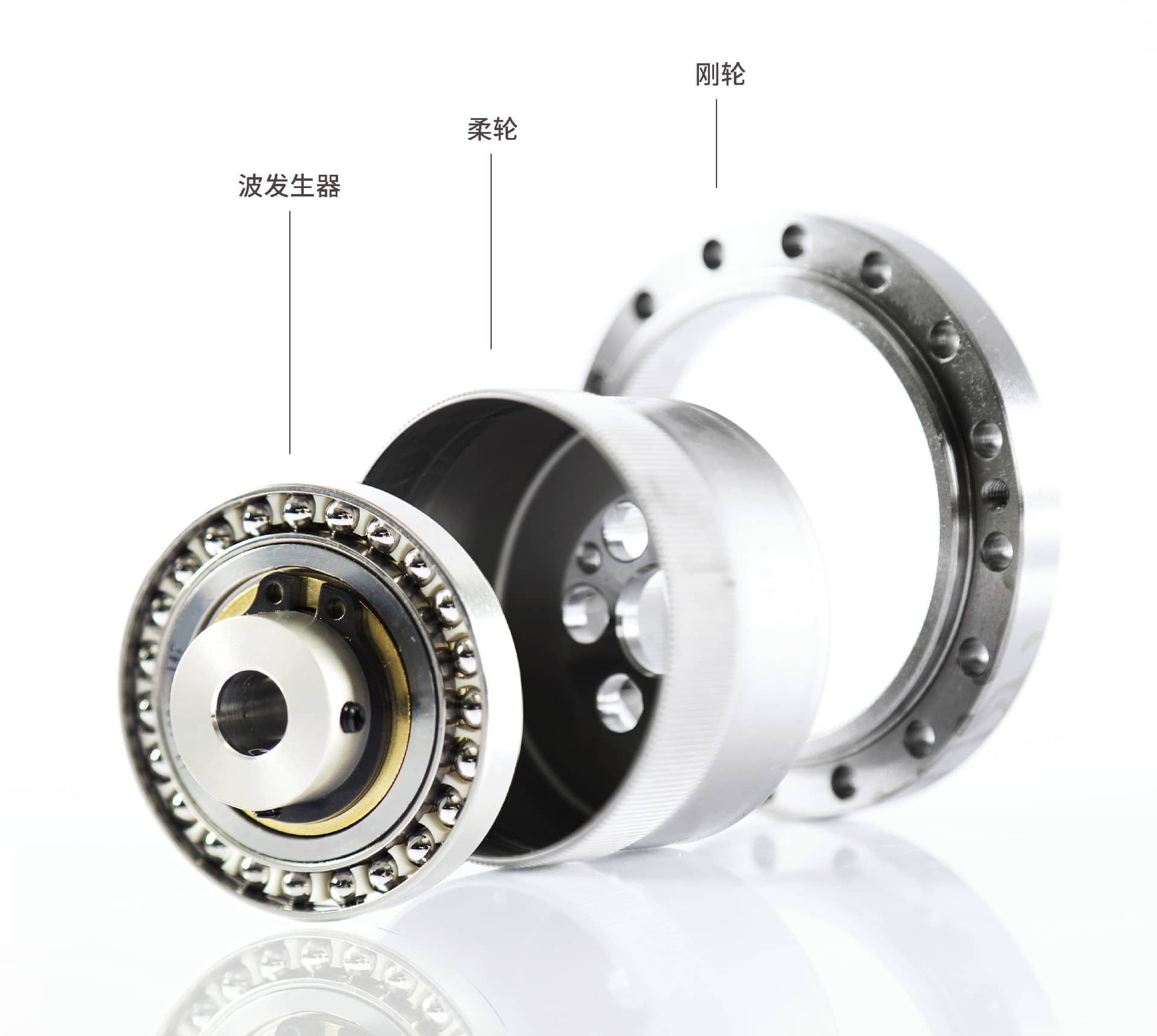
剛輪:剛性環(huán)狀部件,內(nèi)周刻有齒輪,比柔輪齒數(shù)多出2齒,一般固定在機(jī)殼上。
柔輪:薄壁杯型金屬?gòu)椥泽w部件,開口部外周刻有齒輪,柔輪底部被稱為膜片部,通常被安裝在輸出軸上。
波發(fā)生器:在橢圓狀凸輪的外周組裝薄壁滾珠軸承的部件,軸承的內(nèi)輪固定在凸輪上,外輪可通過(guò)滾珠實(shí)施彈性變形,通常被安裝在輸入軸上。
諧波齒輪傳動(dòng)減速原理是利用柔輪、剛輪和波發(fā)生器的相對(duì)運(yùn)動(dòng),主要是柔輪的可控 彈性變形來(lái)實(shí)現(xiàn)運(yùn)動(dòng)和動(dòng)力傳遞的。波發(fā)生器內(nèi)的橢圓形凸輪在柔輪內(nèi)旋轉(zhuǎn)使柔輪產(chǎn)生變形,在波發(fā)生器的橢圓形長(zhǎng)軸兩端處的柔輪輪齒和剛輪輪齒進(jìn)入嚙合時(shí),短軸兩端處的柔輪輪齒與剛輪輪齒脫開。對(duì)于波發(fā)生器長(zhǎng)軸和短軸之間的齒,沿柔輪和剛輪周長(zhǎng)的不同區(qū)段內(nèi)處于逐漸進(jìn)入嚙合的半嚙合嚙合的半嚙合狀態(tài),稱為嚙入。處于逐漸退出狀態(tài),稱為嚙出。當(dāng)波發(fā)生器的連續(xù)轉(zhuǎn)動(dòng)時(shí),柔輪不斷產(chǎn)生形變,使兩輪輪齒在嚙入、嚙合、嚙出和脫開四種運(yùn)動(dòng)不斷改變各自原來(lái)的工作狀態(tài),產(chǎn)生錯(cuò)齒運(yùn)動(dòng),實(shí)現(xiàn)了主動(dòng)波發(fā)生器到柔輪的運(yùn)動(dòng)傳遞。
0°:當(dāng)波發(fā)生器裝入柔輪后,迫使柔輪的剖面由原先的圓形變成橢圓形,其長(zhǎng)軸兩端附近的齒與剛輪的齒完全嚙合,而短軸兩端附近的齒則與剛輪完全脫開;
90°:剛輪固定,波發(fā)生器按順時(shí)針方向旋轉(zhuǎn),柔輪產(chǎn)生彈性變形,與剛輪嚙合的齒輪位置則按逆時(shí)針方向順序移動(dòng)
180°:波發(fā)生器向順時(shí)針方向旋轉(zhuǎn)180度后,柔輪僅向逆時(shí)針方向旋轉(zhuǎn)一個(gè)齒
360°:波發(fā)生器旋轉(zhuǎn)360度(一圈)后,柔輪向逆時(shí)針方向旋轉(zhuǎn)了2個(gè)齒
